Rice Flight
Conceptualize. Construct. Compete.

Rice Flight was formed in the summer of 2022 as a competition team dedicated to designing and manufacturing RC aircraft. In our first year, we qualified for the 2023 AIAA Design, Build, Fly international competition, built a plane to competition specifications, and participated in the competition. In the 2023-2024 school year, we competed in the SAE Aero Advanced 2024 challenge. We were one of only three teams that was able to have our primary aircraft take off, successfully deploy the 1lb autonomous plane, and land, out of 17 teams competing. The following year, we competed in both the Regular and Advanced SAE Aero Design competitions, developing a custom multidimensional aerodynamic optimization tool. The team worked hard to successfully compete with both planes, and took home third place in the Advanced class design report, a strong performance for only our second year at the competition.
We are incredibly proud of our accomplishments as a much newer team than most of our competitors. We have already started research and preparation work for next year’s competition, improving our aerodynamic optimization code and methodology, and exploring advanced simulations of our autonomous software. We are very excited to continue learning and applying our knowledge!
2024-2025: SAE Aero Design Advanced and Regular
For the 2024-2025 competition, we competed in both the Regular and Advanced classes. For the Regular class, we were required to build a 15-foot wingspan aircraft with a power limit of only 750 Watts and a takeoff distance limit of only 100 feet to carry as much payload as possible. For the Advanced competition, we were required to design a 3.5 pound fully autonomous aircraft capable of both horizontal and vertical takeoff, flight, and landing while carrying payloads to and from a landing zone.
Condor (Regular Class)
Condor, our regular class aircraft, was constructed entirely out of Bass and Balsa wood and had an empty weight of 27 pounds with a maximum takeoff weight of 42 pounds within the 100 foot runway limit. Additionally, the entire aircraft was required to dissasemble into 48" sections. We optimized the outer mold line with a custom-developed multidimensional design optimization tool which used computation fluid dynamics (CFD) results from ANSYS Fluent.


Magpie (Advanced Class)
Magpie, our advanced class aircraft, used a tricopter tilt-rotor delta wing configuration to enable both hovering flight and fixed-wing forward flight. Magpie was able to deploy and capture autonomous payloads using a velcro plate fixed to the bottom of the aircraft. We also designed a custom computer vision algorithm running on a Raspberry Pi Zero 2 W companion computer to provide positioning commands to Magpie's flight controller such that the aircraft could precisely land on top of the target payloads.



2023-2024: SAE Aero Design Advanced
Albatross
Albatross was Rice Flight’s Primary Aircraft (PA) for the 2024 SAE Aero Advanced competition. It has a maximum takeoff weight of 31 pounds, and a 9’8” wingspan using a NACA 4412 airfoil. The propulsion system consists of a BA4530 270kV electric motor powered by a 24 Volt 10 Ah lithium-polymer battery, and spinning a 22 inch propeller.
The main objectives for the competition were to carry two payloads: a static water payload, and a deployable Powered Autonomous Delivery Aircraft (PADA). At competition, in addition to carrying over 4 lbs of water as static payload, we were one of only 3 out of 17 teams in the Advanced class to successfully take off, deploy the PADA, and land.
To deploy the PADA, Albatross uses a unique system of electromagnetic attachment. These are controlled by a flight computer connected to a ground control station, and can be turned off to deploy the attached PADA at the correct time. Every other team at the competition used a mechanical method to separate their PADAs from their Primary Aircraft, and most experienced issues with jamming or failure to deploy. In contrast to this, our method has never experienced a fault, and worked flawlessly at competition.


Fluffy, Scruffy, and Gruffy
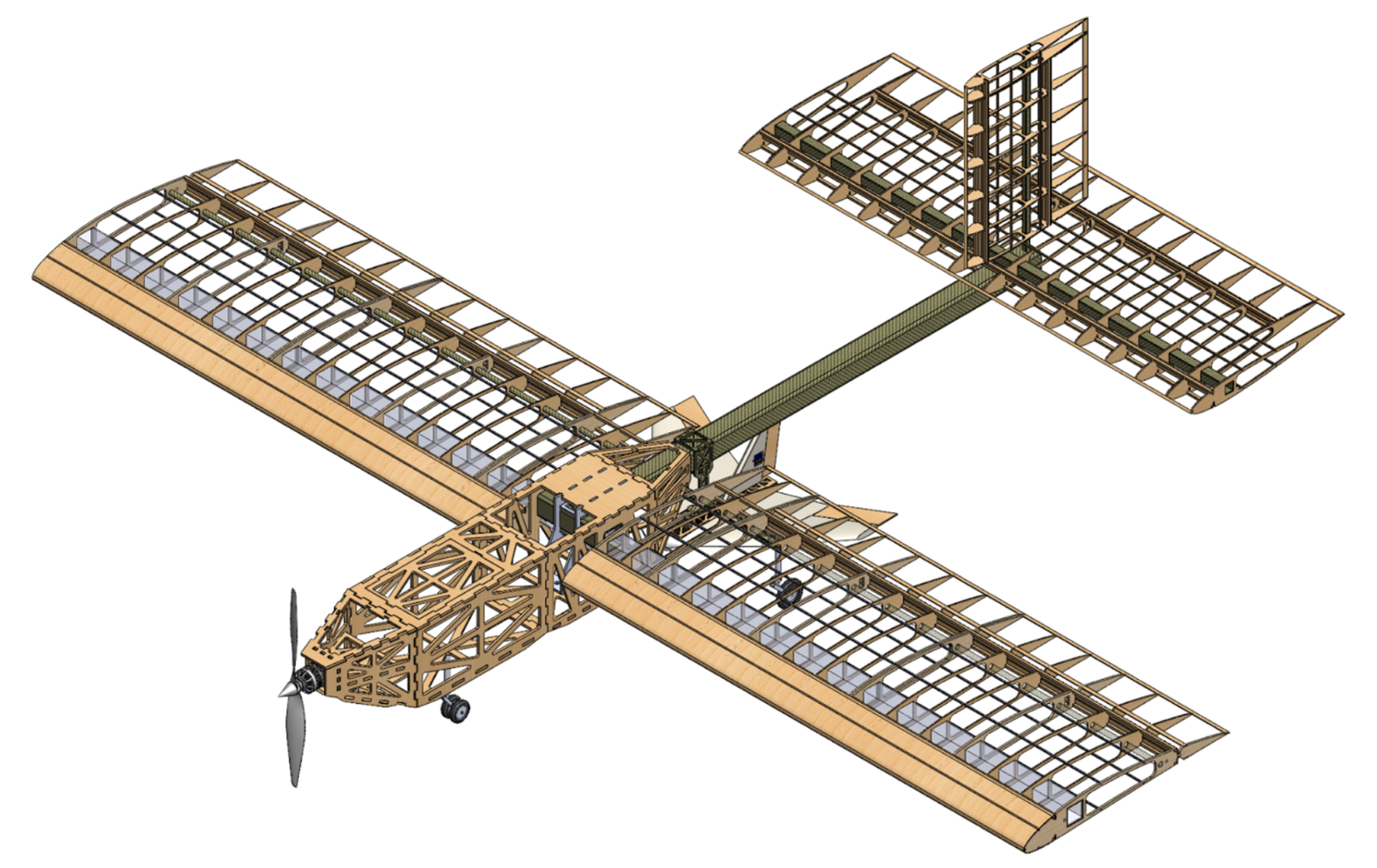
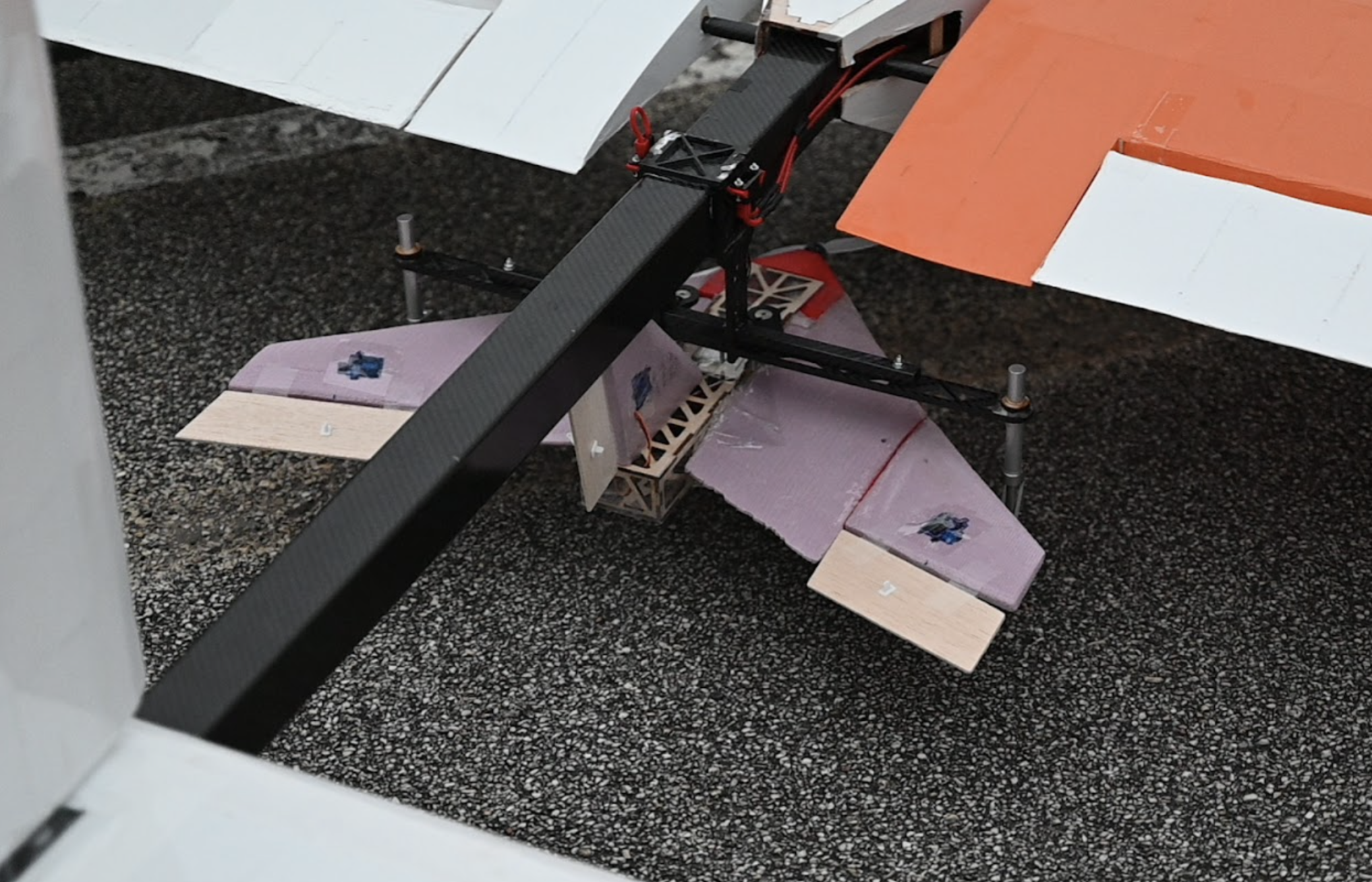
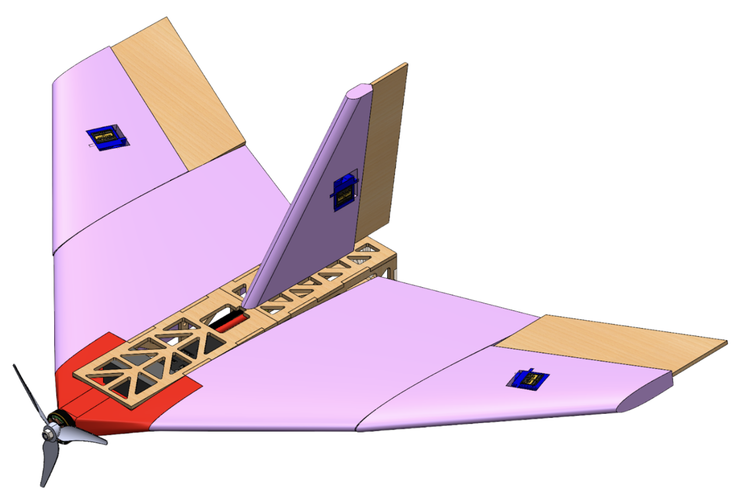
Fluffy, Scruffy, and Gruffy were our three deployable autonomous delivery aircraft (PADA) for the 2024 SAE Aero Advanced competition. They are designed with a weight limit of only 1 lb, so use a delta-wing configuration to increase the wing area to generate sufficient lift. This delta-wing configuration limits control surfaces to elevons, a linear combination of traditional ailerons and elevators. In addition to elevons, there is also a vertical stabilizer and rudder for yaw control.
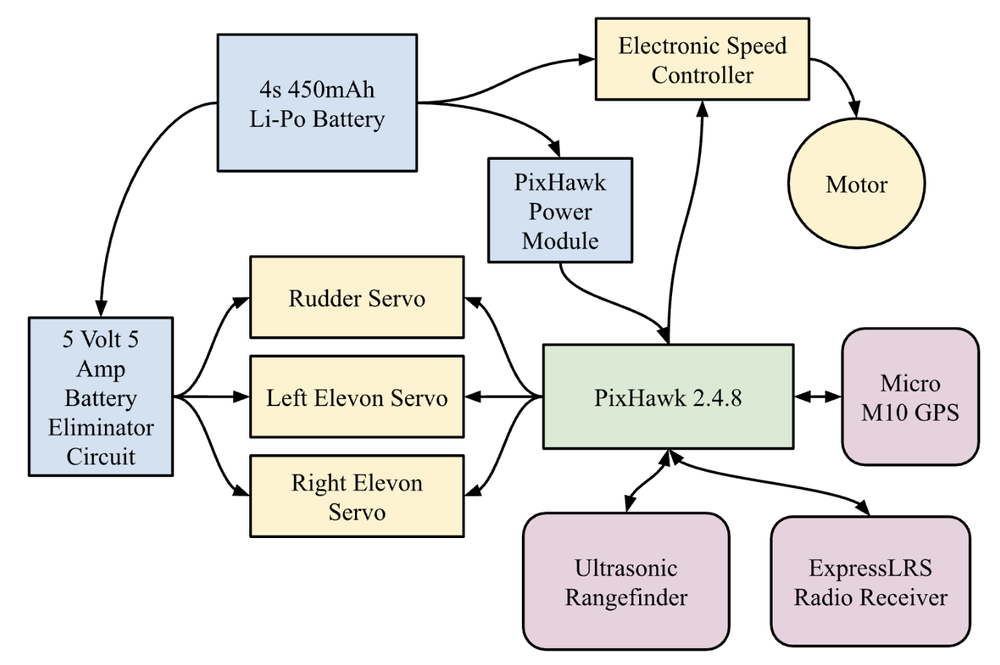
The PADAs are fully autonomous, deploying from the PA in flight, automatically arming, and flying to land at predefined GPS coordinates. The autopilot system is based around a PixHawk 2.4.8 running Ardupilot Plane 4.6, and to help with the autonomous control algorithms each PADA has a GPS unit and sonar rangefinder for determining altitude. A software configuration error at competition resulted in Scruffy nose diving when overcorrecting for altitude after deployment. However, when flying in test flights the PADAs were able to deploy off of Albatross and achieve stable flight before landing, and in ground tests were able to navigate to GPS coordinates for landing.
2022-2023: AIAA DBF (Design-Build-Fly)
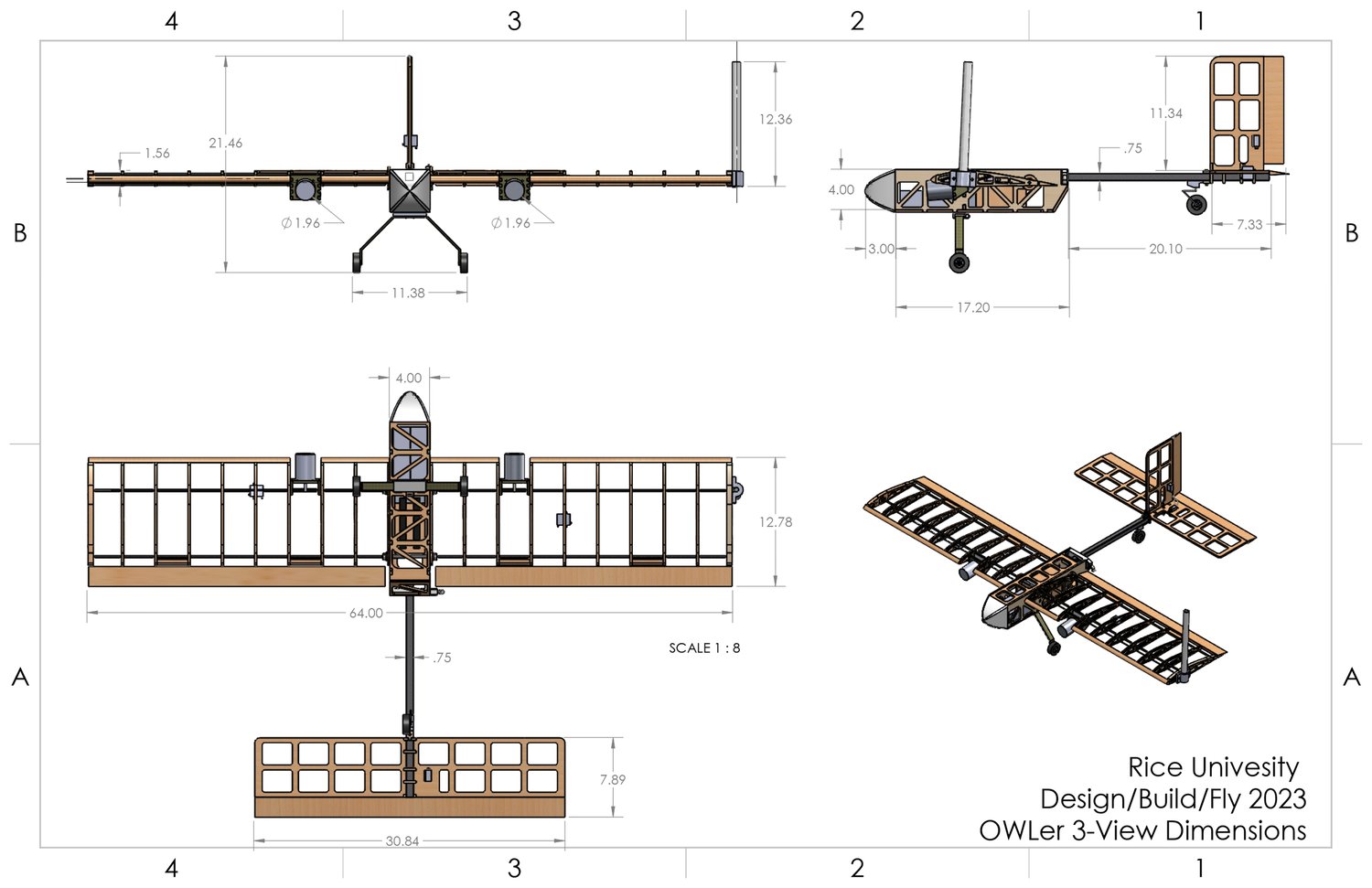
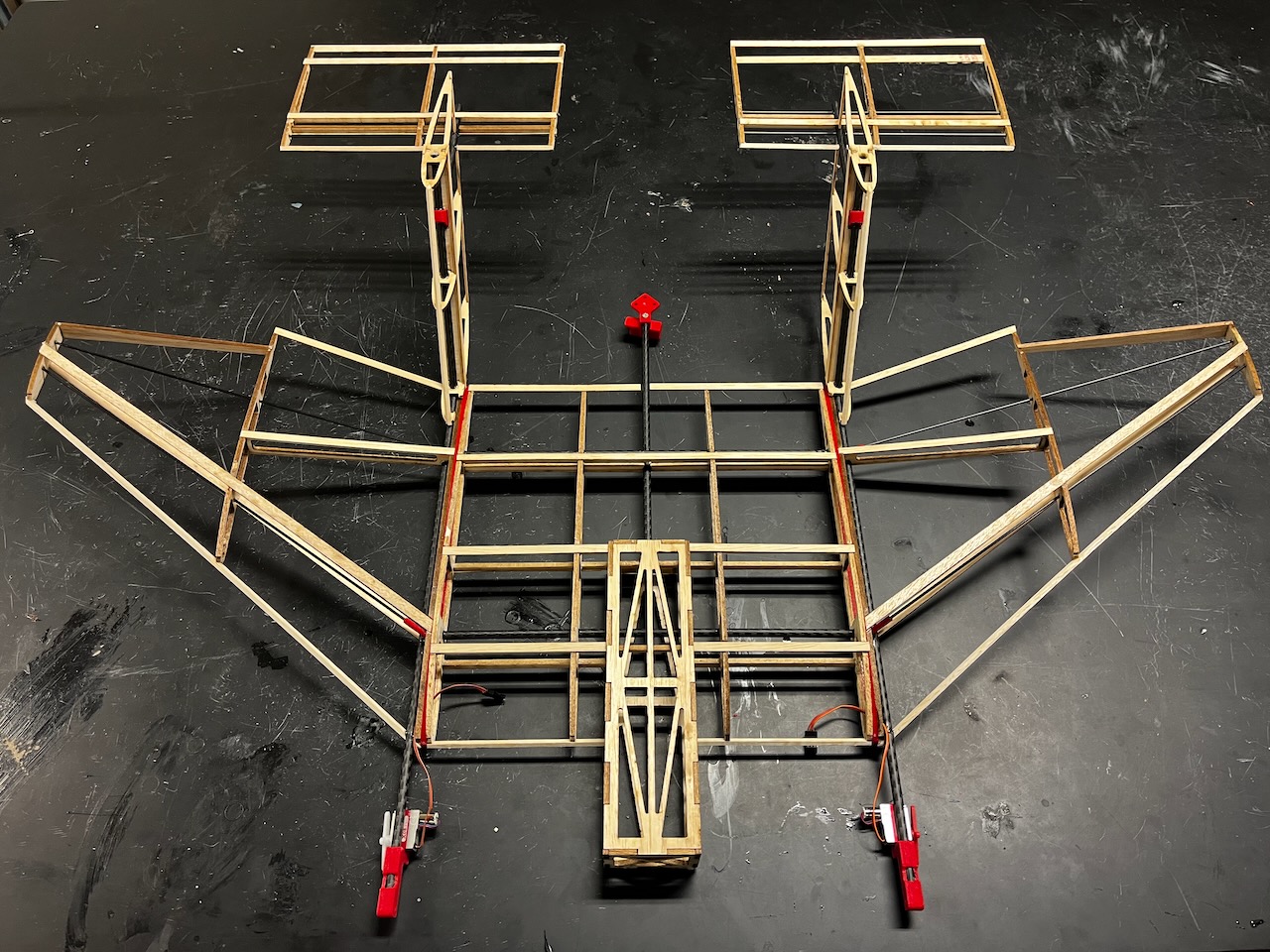
EA-23R Owler
We competed in the AIAA Design, Build, Fly (DBF) competition in Tucson in April 2023. For the DBF competition that year, the challenge was mostly a matter of how quickly the aircraft could take off (within a 50’ limit) fly a 1000’ course with a tight turn, and land. We were limited to a 100 Watt-hour battery per motor, and the plane had to disassemble and fit in a box of 48 linear inches. The competition required us to be able to assemble the components of the plane in under a 5 minute window without any tools.
Because it was our first year and the team consisted entirely of underclassmen with no previous fixed-wing aviation experience, we did not place in competition, but we built OWLer to competition requirements and attended the event. We learned a lot by talking to mentors and other teams, and this set us up for success in future years.